|
|
| Regel 8: |
Regel 8: |
| | |Aantalplaatjes= 05 | | |Aantalplaatjes= 05 |
| | |Aantalfilmpjes= 00 | | |Aantalfilmpjes= 00 |
| − | |Auteursrecht= Nee
| |
| | }} | | }} |
| | {{Afbeelding | | {{Afbeelding |
| | |Bestand= HDL_Servo-01.jpg | | |Bestand= HDL_Servo-01.jpg |
| | |Grootte= Heel klein | | |Grootte= Heel klein |
| − | |Volgnummer= E10.18.01-01 | + | |Volgnummer= 01 |
| | |Omschrijving= Servo | | |Omschrijving= Servo |
| | |Maker= Hans de Loof <br /><br /> | | |Maker= Hans de Loof <br /><br /> |
| Regel 29: |
Regel 28: |
| | |Bestand= HDL_LocoNet_Servo_Module-01.jpg | | |Bestand= HDL_LocoNet_Servo_Module-01.jpg |
| | |Grootte= 600px | | |Grootte= 600px |
| − | |Volgnummer= E10.18.01-02 | + | |Volgnummer= 02 |
| | |Omschrijving= Servo-module in testopstelling | | |Omschrijving= Servo-module in testopstelling |
| | |Maker= Hans de Loof | | |Maker= Hans de Loof |
| Regel 37: |
Regel 36: |
| | |Bestand= HDL_LocoNet_Servo-print-02.jpg | | |Bestand= HDL_LocoNet_Servo-print-02.jpg |
| | |Grootte= Klein | | |Grootte= Klein |
| − | |Volgnummer= E10.18.01-03 | + | |Volgnummer= 03 |
| | |Omschrijving= De print voor de servo-module | | |Omschrijving= De print voor de servo-module |
| | |Maker= Hans de Loof | | |Maker= Hans de Loof |
| | }} | | }} |
| | | | |
| − | De module wordt gebouwd op een print (zie: foto E10.18.01-03), die te bestellen is via de website van Hans de Loof. | + | De module wordt gebouwd op een print (zie: foto 03), die te bestellen is via de website van Hans de Loof. |
| | | | |
| | {{Afbeelding | | {{Afbeelding |
| | |Bestand= HDL_LocoNet_Servo_print-01.jpg | | |Bestand= HDL_LocoNet_Servo_print-01.jpg |
| | |Grootte= Klein | | |Grootte= Klein |
| − | |Volgnummer= E10.18.01-04 | + | |Volgnummer= 04 |
| | |Omschrijving= De onderdelen zijn op de print gemonteerd | | |Omschrijving= De onderdelen zijn op de print gemonteerd |
| | |Maker= Hans de Loof | | |Maker= Hans de Loof |
| | }} | | }} |
| | | | |
| − | Na montage van de benodigde onderdelen ziet de module er zo uit (zie: foto E10.18.01-04). | + | Na montage van de benodigde onderdelen ziet de module er zo uit (zie: foto 04). |
| | | | |
| | | | |
| Regel 59: |
Regel 58: |
| | |Bestand= HDL_LocoNet_Servo_programma-01.jpg | | |Bestand= HDL_LocoNet_Servo_programma-01.jpg |
| | |Grootte= Normaal | | |Grootte= Normaal |
| − | |Volgnummer= E10.18.01-05 | + | |Volgnummer= 05 |
| | |Omschrijving= Het programma waarmee de LocoNet-module in te stellen is | | |Omschrijving= Het programma waarmee de LocoNet-module in te stellen is |
| | |Bron= Hans de Loof | | |Bron= Hans de Loof |
| | }} | | }} |
| | | | |
| − | Vanaf de website van Hans de Loof is een programma te downloaden om de servo-module in te stellen (zie: afbeelding E10.18.01-05). | + | Vanaf de website van Hans de Loof is een programma te downloaden om de servo-module in te stellen (zie: afbeelding 05). |
| | | | |
| | | | |
| Regel 87: |
Regel 86: |
| | |Vorige= Wat is een Servo? | | |Vorige= Wat is een Servo? |
| | |Volgende= E10.50 - Analoge baanbesturing | | |Volgende= E10.50 - Analoge baanbesturing |
| − | |VorigeMenu= E10.00 - Digitale baanbesturing | + | |VorigeMenu= Digitale baanbesturing |
| | }} | | }} |
| | | | |
Onder redactie van: BeneluxSpoor.net / Auteur: Hans de Loof

|
| Afbeelding: 01
|
| Servo
|
Foto gemaakt door: Hans de Loof
|
Deze module is een variant van een LocoIO (zie: hieronder bij 'Meer informatie'). Hiermee kunnen acht analoge
servo's aangestuurd worden met twee posities, òf vier servo's met vier posities en deze bevat tevens een LocoIO vier-bits ingang/uitgang.
- Voor de vier-bits ingang/uitgang, zie de LocoIO handleiding (zie link hieronder bij 'Meer informatie').
- De servo kan verdraaien in een hoek van 90° van 'Positie 1 = 1' tot 'Positie 2 = 127'. 'Positie 1' en 'Positie 2' kunnen ingesteld worden binnen die 90° met een waarde van 1 tot 127. De servo wordt verplaatst van de ene positie naar de andere door een 'Vast Contact' melding. De verplaatsing kan plaatsvinden met vier verschillende snelheden, welke afzonderlijk per servo instelbaar zijn. De 'snelheid = 0' is de snelste, de 'snelheid = 3' is de traagste.
- De servo kan ook een continue heen-en-weer gaande beweging uitvoeren, met twee verschillende snelheden, door middel van het instellen van 'Snelheid = 4' of 'Snelheid = 5'. 'Positie 1' is dan vast ingesteld op 'waarde = 1'. 'Positie 2' kan vrij gekozen worden tussen 1 en 127, en bepaalt dan de hoek van de beweging. De 'Vast Contact'-melding bepaalt dan of de servo de heen-en-weer gaande beweging tussen positie 1 en positie 2 uitvoert of op positie 1 blijft stil staan. De continue heen-en-weer gaande beweging is niet instelbaar bij selectie van 'Vier-positie servo'.
Met de servo's kunt u wissels, overwegbomen, mechanische seinen, slagbomen, deuren van locloodsen, enz… bedienen/aandrijven.
|
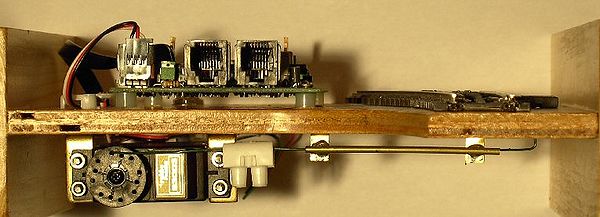
| Afbeelding: 02
|
| Servo-module in testopstelling
|
| Foto gemaakt door: Hans de Loof
|
|
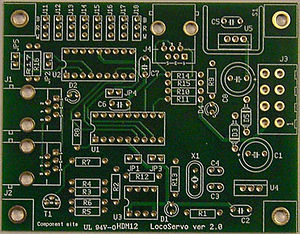
| Afbeelding: 03
|
| De print voor de servo-module
|
| Foto gemaakt door: Hans de Loof
|
De module wordt gebouwd op een print (zie: foto 03), die te bestellen is via de website van Hans de Loof.
|
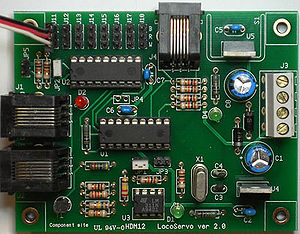
| Afbeelding: 04
|
| De onderdelen zijn op de print gemonteerd
|
| Foto gemaakt door: Hans de Loof
|
Na montage van de benodigde onderdelen ziet de module er zo uit (zie: foto 04).
Programma
|
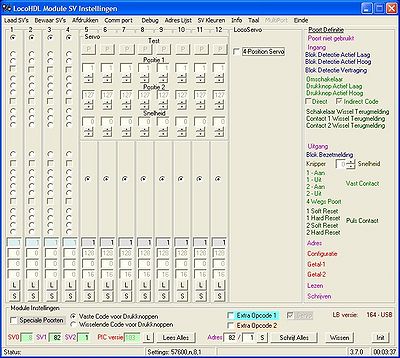
| Afbeelding: 05
|
| Het programma waarmee de LocoNet-module in te stellen is
|
| Bron: Hans de Loof
|
Vanaf de website van Hans de Loof is een programma te downloaden om de servo-module in te stellen (zie: afbeelding 05).
Meer informatie




